AVL Cruise前向仿真(Simulation 1~5)算法详解
前向算法相比后向算法,可以得到更精确的仿真结果;
其中,显式算法通常需要设置较小的步长以确保稳定性和精度,隐式算法可以设置较大的步长,但需要进行迭代计算,因此相同步长情况下的仿真效率比显式算法要低;
本教程主要包含以下内容:
Simulation 1、2、3、4、5算法特点简介;
各前向仿真算法步长设置建议;
各前向仿真算法对比总结;
降低内存和提高仿真效率的方法介绍;
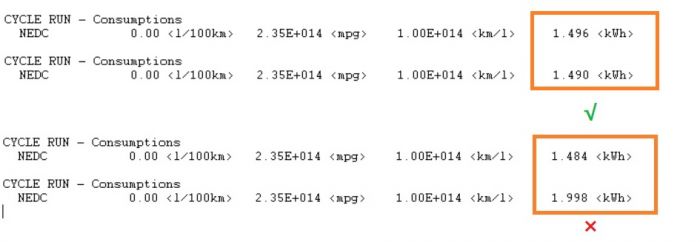
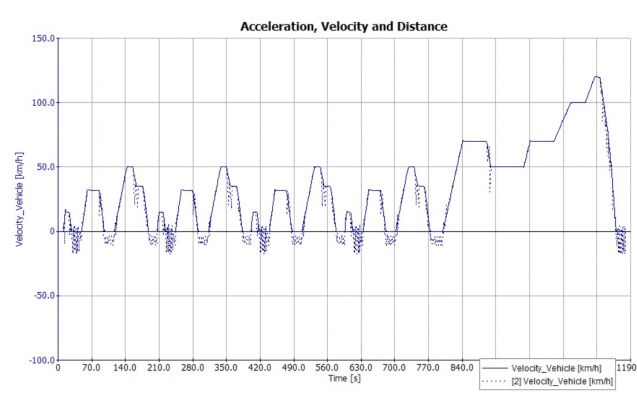
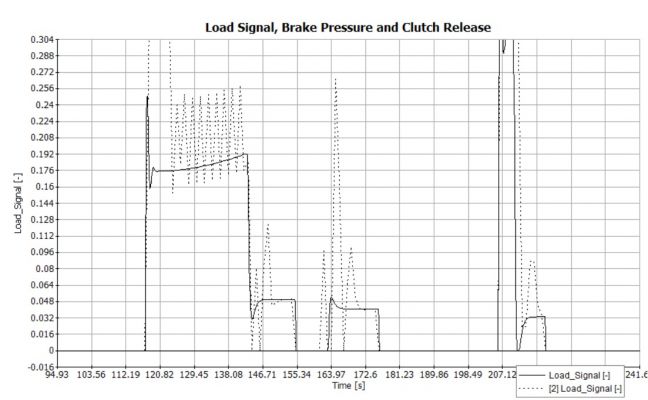
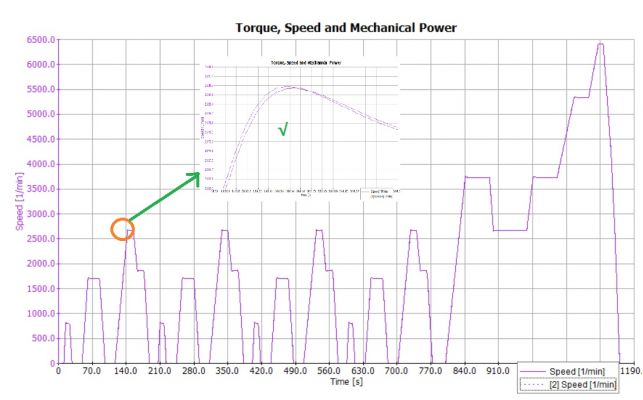
常用对比验证方法介绍;
© Copyright 2012-2142 www.Avl-Cruise.com Some rights reserved. 皖ICP备15024617号-5